


Authors:
Hamed Z. Jahromi (University College Dublin), Ivan Bartolec (University of Zagreb), Edwin Gamboa (TU Ilmenau), Andrew Hines (University College Dublin), Raimund Schatz (AIT Austrian Institute of Technology)
This article provides insights towards the Telepresence Robot (TPR) QoE research agenda and summarizes the findings of a TPR QoE study as provided in H. Z. Jahromi, I. Bartolec, E. Gamboa, A. Hines and R. Schatz, "You Drive Me Crazy! Interactive QoE Assessment for Telepresence Robot Control," 2020 Twelfth International Conference on Quality of Multimedia Experience (QoMEX), Athlone, Ireland, 2020, pp. 1-6, doi: 10.1109/QoMEX48832.2020.9123117.
Editors: Tobias Hoßfeld (University of Würzburg, Germany), Christian Timmerer (Alpen-Adria-Universität (AAU) Klagenfurt and Bitmovin Inc., Austria)
Telepresence robots (TPRs) are remote-controlled, wheeled devices with an internet connection. A TPR can “teleport” you to a remote location, let you drive around and interact with people. A TPR user can feel present in the remote location by being able to control the robot position, movements, actions, voice and video. A TPR facilitates human-to-human interaction, wherever you want and whenever you want. The human user sends commands to the TPR by pressing buttons or keys from a keyboard, mouse, or joystick.

In recent years, people from different environments and backgrounds have started to adopt TPRs for private and business purposes such as attending a class, roaming around the office and visiting patients. Due to the COVID-19 pandemic, adoption in healthcare has increased in order to facilitate social distancing and staff safety [Ackerman 2020, Tavakoli et al. 2020].

Despite such increase in adoption, a research gap remains from a QoE perspective, as TPRs offer interaction beyond the well understood QoE issues in traditional static audio-visual conferencing. TPRs, as remote-controlled vehicles, enable users with some form of physical presence at the remote location. Furthermore, for those people interacting with the TPR at the remote location, the robot is a physical representation or proxy agent of its remote operator. The operator can physically interact with the remote location by driving over an object or pushing an object forward. These aspects of teleoperation and navigation represent an additional dimension in terms of functionality, complexity and experience.
Navigating a TPR may pose challenges to end-users and influence their perceived quality of the system. For instance, when a TPR operator is driving the robot, he/she expects an instantaneous reaction from the robot. An increased delay in sending commands to the robot may thus negatively impact robot mobility and the user’s satisfaction, even if the audio-visual communication functionality itself is not affected.
In a recent paper published at QoMEX 2020 [Jahromi et al. 2020], we addressed this gap in research by means of a subjective QoE experiment that focused on the QoE aspects of live TPR teleoperation over the internet. We were interested in understanding how network QoS-related factors influence the operator’s QoE when using a TPR in an office context.
TPR QoE User Study and Experimental Findings
In our study, we investigated the QoE of TPR navigation along three research questions: 1) impact of network factors including bandwidth, delay and packet loss on the TPR navigation QoE, 2) discrimination between navigation QoE and video QoE, 3) impact of task on TPR QoE sensitivity.
The QoE study participants were situated in a laboratory setting in Dublin, Ireland, where they navigated a Beam Plus TPR via keyboard input on a desktop computer. The TPR was placed in a real office setting of California Telecom in California, USA. Bandwidth, delay and packet loss rate were manipulated on the operator’s PC.

A total of 23 subjects participated in our QoE lab study: 8 subjects were female and 15 male and the average test duration was 30 minutes per participant. We followed ITU-T Recommendation BT.500 and detected three participants as outliers which were excluded from subsequent analysis. A post-test survey shows that none of the participants reported task boredom as a factor. In fact, many reported that they enjoyed the experience!
The influence of network factors on Navigation QoE
All three network influence factors exhibited a significant impact on navigation QoE but in different ways. Above a threshold of 0.9 Mbps, bandwidth showed no influence on navigation QoE, while 1% packet loss already showed a noticeable impact on the navigation QoE. A mixed-model ANOVA confirms that the impact of the different network factors on navigation quality ratings is statistically significant (see [Jahromi et al. 2020] for details). From the figure below, one can see that the levels of navigation QoE MOS, as well as their sensitivity to network impairment level, depend on the actual impairment type.
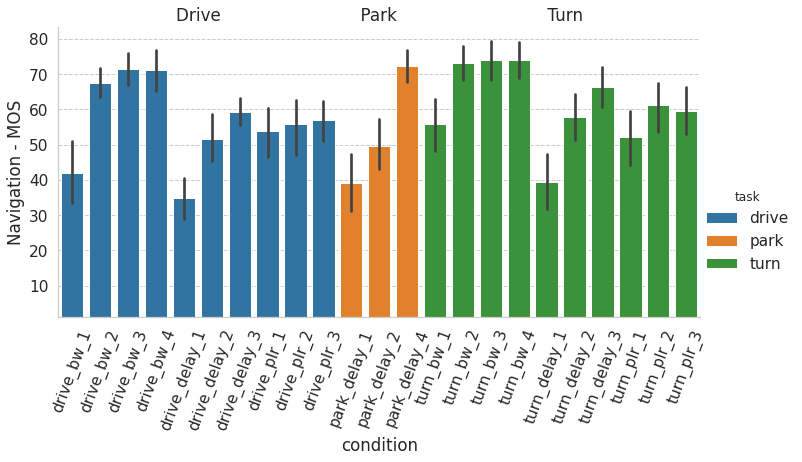

The bar plots illustrate the influence of network QoS factors on the navigation quality (left) and the video quality (right).
Discrimination between navigation QoE and video QoE
Our study results show that the subjects were capable of discriminating between video quality and navigation quality, as they treated them as separate concepts when it comes to experience assessment. Based on ANOVA analysis [Jahromi et al. 2020], we see that the impact of bandwidth and packet loss on TPR video quality ratings were statistically significant. However, for the delay, this was not the case (in contrast to navigation quality). A comparison of navigation quality and video quality subplots shows that changes in MOS across different impairment levels diverge between the two in terms of amplitude. To quantify this divergence, we performed a Spearman Rank Ordered Correlation Coefficient (SROCC) analysis, revealing only a weak correlation between video and navigation quality (SROCC =0.47).
Impact of task on TPR QoE sensitivity
Our study showed that the type of TPR task had more impact on navigation QoE than streaming video QoE. Statistical analysis reveals that the actual task at hand significantly affects QoE impairment sensitivity, depending on the network impairment type. For example, the interaction between bandwidth and task is statistically significant for navigation QoE, which means that changes in bandwidth were rated differently depending on the task type. On the other hand, this was not the case for delay and packet loss. Regarding video quality, we do not see a significant impact of task on QoE sensitivity to network impairments, except for the borderline case for packet loss rate.
Conclusion: Towards a TPR QoE Research Agenda
There were three key findings from this study. First, we understand that users can differentiate between visual and navigation aspects of TPR operation. Secondly, all three network factors have a significant impact on TPR navigation QoE. Thirdly, visual and navigation QoE sensitivity to specific impairments strongly depends on the actual task at hand. We also found the initial training phase to be essential in order to ensure familiarity of participants with the system and to avoid bias caused by novelty effects. We observed that participants were highly engaged when navigating the TPR, as was also reflected in the positive feedback received during the debriefing interviews. We believe that our study methodology and design, including task types, worked very well and can serve as a solid basis for future TPR QoE studies.
We also see the necessity of developing a more generic, empirically validated, TPR experience framework that allows for systematic assessment and modelling of QoE and UX in the context of TPR usage. Beyond integrating concepts and constructs that have been already developed in other related domains such as (multi-party) telepresence, XR, gaming, embodiment and human-robot interaction, the development of such a framework must take into account the unique properties that distinguish the TPR experience from other technologies:
- Asymmetric conditions
The factors influencing QoE for TPR users are not only bidirectional, they are also different on both sides of TPR, i.e., the experience is asymmetric. Considering the differences between the local and the remote location, a TPR setup features a noticeable number of asymmetric conditions as regards the number of users, content, context, and even stimuli: while the robot is typically controlled by a single operator, the remote location may host a number of users (asymmetry in the number of users). An asymmetry also exists in the number of stimuli. For instance, the remote users perceive the physical movement and presence of the operator by the actual movement of the TPR. The experience of encountering a TPR rolling into an office is a hybrid kind of intrusion, somewhere between a robot and a physical person. However, from the operator’s perspective, the experience is a rather virtual one, as he/she only becomes conscious of physical impact at the remote location only by means of technically mediated feedback.
- Social Dimensions
According to [Haans et al. 2012], the experience of telepresence is defined as “a consequence of the way in which we are embodied, and that the capability to feel as if one is actually there in a technologically mediated or simulated environment is a natural consequence of the same ability that allows us to adjust to, for example, a slippery surface or the weight of a hammer”.
The experience of being present in a TPR-mediated context goes beyond AR and VR. It is a blended physical reality. The sense of ownership of a wheeled TPR by means of mobility and remote navigation of using a “physical” object, allows the users to feel as if they are physically present in the remote environment (e.g. a physical avatar). This allows the TPR users to get involved in social activities, such as accompanying people and participating in discussions while navigating, sharing the same visual scenes, visiting a place and getting involved in social discussions, parties and celebrations. In healthcare, a doctor can use TPR for visiting patients as well as dispensing and administering medication remotely.
- TPR Mobility and Physical Environment
Mobility is a key dimension of telepresence frameworks [Rae et al. 2015]. TPR mobility and navigation features introduce new interactions between the operators and the physical environment. The environmental aspect becomes an integral part of the interaction experience [Hammer et al. 2018].
During a TPR usage, the navigation path and the number of obstacles that a remote user may face can influence the user’s experience. The ease or complexity of navigation can change the operator’s focus and attention from one influence factor to another (e.g., video quality to navigation quality). In Paloski et al’s, 2008 study, it was found that cognitive impairment as a result of fatigue can influence user performance concerning robot operation [Paloski et al. 2008]. This raises the question of how driving and interaction through TPR impacts the user’s cognitive load and results in fatigue compared to physical presence.
The mobility aspects of TPRs can also influence the perception of spatial configurations of the physical environment. This allows the TPR user to manipulate and interact with the environment from a spatial configuration aspect [Narbutt et al. 2017]. For example, the ambient noise of the environment can be perceived at different levels. The TPR operator can move the robot closer to the source of the noise or keep a distance from it. This can enhance his/her feelings of being present [Rae et al. 2015].
Above distinctive characteristics of a TPR-mediated context illustrate the complexity and the broad range of aspects that potentially have a significant influence on the TPR quality of user experience. Consideration of these features and factors provides a useful basis for the development of a comprehensive TPR experience framework.
References
- [Tavakoli et al. 2020] Tavakoli, Mahdi, Carriere, Jay and Torabi, Ali. (2020). Robotics For COVID-19: How Can Robots Help Health Care in the Fight Against Coronavirus.
- [Ackerman 2020] E. Ackerman (2020). Telepresence Robots Are Helping Take Pressure Off Hospital Staff, IEEE Spectrum, Apr 2020
- [Jahromi et al. 2020] H. Z. Jahromi, I. Bartolec, E. Gamboa, A. Hines, and R. Schatz, “You Drive Me Crazy! Interactive QoE Assessment for Telepresence Robot Control,” in 12th International Conference on Quality of Multimedia Experience (QoMEX 2020), Athlone, Ireland, 2020.
- [Hammer et al. 2018] F. Hammer, S. Egger-Lampl, and S. Möller, “Quality-of-user-experience: a position paper,” Quality and User Experience, vol. 3, no. 1, Dec. 2018, doi: 10.1007/s41233-018-0022-0.
- [Haans et al. 2012] A. Haans & W. A. Ijsselsteijn (2012). Embodiment and telepresence: Toward a comprehensive theoretical framework✩. Interacting with Computers, 24(4), 211-218.
- [Rae et al. 2015] I. Rae, G. Venolia, JC. Tang, D. Molnar (2015, February). A framework for understanding and designing telepresence. In Proceedings of the 18th ACM conference on computer supported cooperative work & social computing (pp. 1552-1566).
- [Narbutt et al. 2017] M. Narbutt, S. O’Leary, A. Allen, J. Skoglund, & A. Hines, (2017, October). Streaming VR for immersion: Quality aspects of compressed spatial audio. In 2017 23rd International Conference on Virtual System & Multimedia (VSMM) (pp. 1-6). IEEE.
- [Paloski et al. 2008] W. H. Paloski, C. M. Oman, J. J. Bloomberg, M. F. Reschke, S. J. Wood, D. L. Harm, … & L. S. Stone (2008). Risk of sensory-motor performance failures affecting vehicle control during space missions: a review of the evidence. Journal of Gravitational Physiology, 15(2), 1-29.